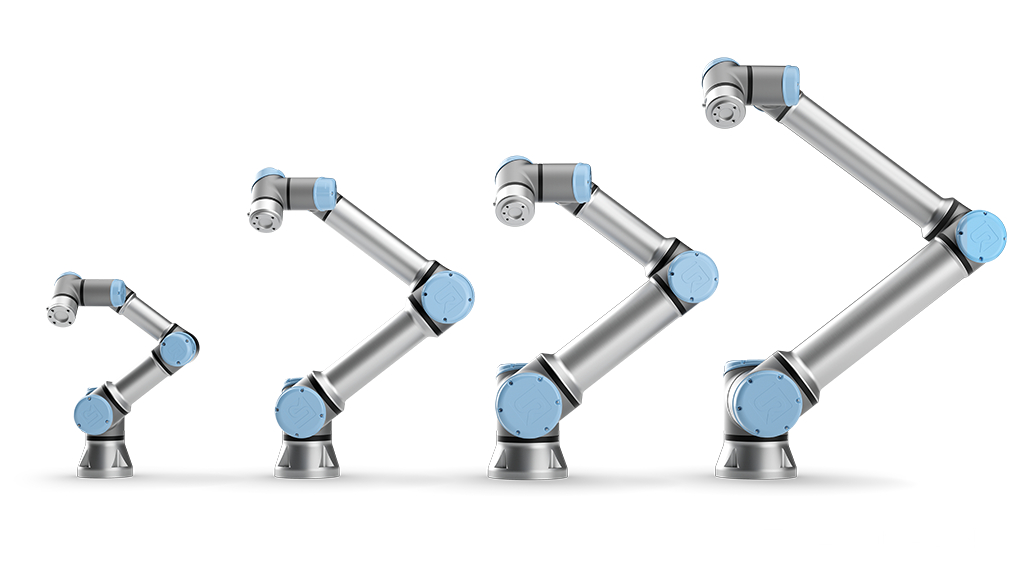
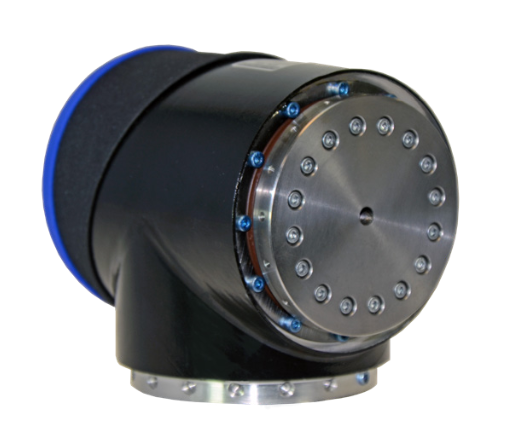
通常由4-6个关节模组构成,可以实现多自由度协调运动。 关节模组通常采用直驱电机+谐波减速器+双编码器形式构成,具有非常好的位置精度。
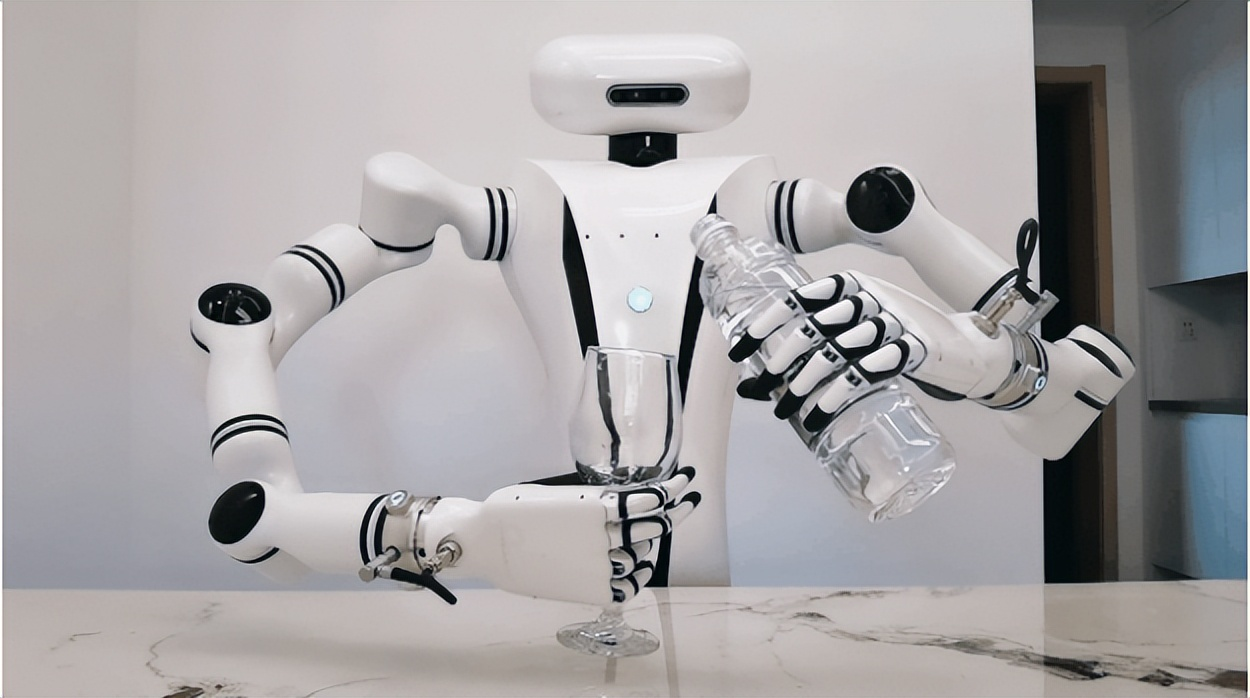
可以集成力控和力闭环,已实现试教功能及防碰撞功能。 增加摄像头亦可以配合实现视觉算法的加成,更加智能化。